2月12日����,國際期刊《Angew. Chem. Int. Ed.》雜志在線刊發了我院甘泉教授的最新研究成果“Foldaxane-Based Switchable [c2]Daisy Chains”。
模仿生命體中各種重要細胞器的工作過程,揭示其功能的化學本質是超分子化學領域得以建立并發展的目標之一�����。超分子化學家們從自然現象中吸取靈感,基于主客體間的互補識別作用構筑了一系列形態各異的人工分子機器:輪烷��,索烴和分子馬達等�����。在構建輪烷時����,若將游離狀態下能夠彼此識別的主客體分子用共價鍵銜接成一個整體�,則該分子的客體部分將可能絡合于另一個分子的主體大環中,形成首尾連接的[c2]雛菊鏈(daisy chain)復合物(如下圖1所示)。在構建過程中,通常需要在分子的兩側進行封端以避免大環分子的滑落。然而,封端反應會增加主客體結合的不穩定性,極大降低[c2]雛菊鏈產率。另外,過多的副反應使得產物的分離純化更加困難�����,阻礙了對其性質功能的進一步探索�。
芳香酰胺折疊體為解決上述難題帶來了機遇。我們課題組設計、合成了一類折疊體與多肽共價連接的分子序列���,由于折疊體與多肽間存在氫鍵作用,該分子能高效自組裝成[c2]雛菊鏈結構。不同于以往的大環雛菊鏈�����,折疊體雛菊鏈是通過解螺旋-再纏繞的機制形成主客體復合物�����,不再需要封端反應產生的不可逆機械互鎖形式���。盡管這種絡合機制在動力學上可逆���,但緩慢的解離速度使得該互穿體系足夠穩定����,為后續分子運動調控提供了基礎���。
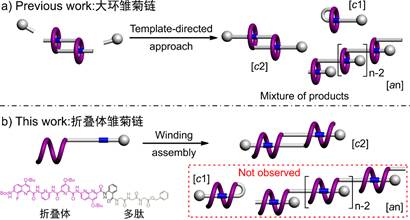
圖1. 構筑[c2]雛菊鏈的策略
在此基礎上�����,我們將序列中多肽部分延長�,使折疊體可以在多個識別作用位點間往返梭動�����,從而構建了[c2]雛菊鏈型人工分子肌肉(圖2)�。通過保護/去保護反應調節識別位點的氨基�,改變其空間位阻,可實現對分子肌肉拉伸/壓縮運動狀態的調控�。該研究為進一步探索基于動態組裝的復雜分子體系奠定了基礎����。
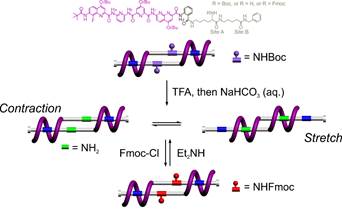
圖2. [c2]雛菊鏈型人工分子肌肉調控示意圖
甘泉教授為本文通訊作者�����,我院2021級碩士研究生廖思蓓為論文的第一作者,華中科技大學為唯一通訊單位�。該研究工作得到了國家自然科學基金 (no.21871101) 和生物無機化學與藥物湖北省重點實驗室基金 (No. BCMM202203) 的資助�����。
